0
0 2023-12-01 22:12
2023-12-01 22:121.求一篇4自由度工业机械手的毕业设计论文
应用实例及精度分析 摘要测量三个自由度机械臂:测量臂的三个自由度,沿X测量对象,Y,Z三个坐标轴平移,只有位置与运动部件的测量跟踪。
关节测量臂是由安装在各关节的相对运动的传感器测得,并因此间接地实现端部执行器的位置测量。 因此,这个问题属于直接的问题机器人运动学。
关键词:测量;自由度;姿势;并联机床,传感器,信号,精密 1 应用实例飞速发展,机器性能要求比较 高。传统该机采用了一系列嵌套的堆叠体,臃肿,以及由于一系列的错误 链的积累,不利于提高精度,传统的四坐标加 较窄的工作机技术,也很难实现任何额外的表面处理,以及 5轴加工工具是非常昂贵的和低的速度。
因此,结构 刚度,承载比,定位精度高,结构紧凑和网上 引起了学者们的机器的注意,水货机因此而诞生。 提出了使用额外的实时测量运动 平台定位精度直接测量机制。
其基本思想是基于额外测量的固定平台和平台之间的身体移动量的测量运动运动平台的运动,通过测量安装时驱动<运动平台 创造的运动特性由药代动力学建模运输传感器机制/>移动平台获得的显示解决方案的地位。当测量 解决前沿速度,满足实时控制的要求,你可以 受益的实时反馈到机床精度补偿和控制。
基于上述想法,以建立一个并行机位置测量系统 机器切割力和变形关节间隙和其他错误的部分排除,以提高定位精度 机。在三自由度串联机构都采用 副然后转向运动是非常灵活的,使用移动副的,往往是需要锻炼,尤其是靠近基地的运动副更是如此。
测量仪由一系列的三自由度机构,罚款密码板的每个回合动关节,以衡量不同之间的角度。其端件由一个界面元素和机器人执行器连接 。
当机床运动平台变化的测量位置,测量仪器 片的端部移动与平台的运动,从而导致米关闭 两个相邻杆之间的角度的每个部分从变精致的密码通过计算卡插入电脑处理软件测得的相对 角落的变化信号,通过运行 运动学正解的实时显示测试程序移动部件的当前位置 量每块板,为了实现位置测量。 2 精度分析主要影响的机械机器人的身体部位,安装误差教育部 零部件制造误差,整机装配误差和机器人的精度。
此外,温度,所产生的驱动杠杆作用的操作力变得 形传输错误,控制系统错误等。测定和补偿这些误差 是在实践中是必不可少的。
2.1测试的基本概念 错误在任何测试过程中,无论多么完美的正方形 测试如何准确的测试方法和装置都不可避免地产生测试 误差,测试结果不能绝对准确。因此,为了测量与相应的精度得到 测试结果,必须正确估计的测量误差,该测试结果的可靠性。
测试误差是测量值与真实值之间的差额,即 △X = X-X0 公式:△x ---定义测试误差; x - - 测量值; X0 ---真正的价值。 其中测得的真实大小本身的真正价值了。
2.2基本类型的测试误差 1)数学表达式错误划分--- 相对绝对误差和误差; - 工具 2)源错误的划分和错误的错误 可怜方法,根据错误的划分---发生系统错误,梯度 误差,随机误差和粗差法 3); 4 )按条件除法---基本误差和附加误差; 5)除以测得的速度误差---静态和动态误差 较差。误差误差间接测量过程中直接测量误差 行的基础上。
物理量不能直接测量,但必须由一定数目的计算出的能量 直接测量的量来确定。由于直接测量 难免产生错误,从这些直接测量的结果包含错误 计算不可避免地包含错误。
间接测量法是 世代的关系的算术平均值的函数的测得的各种参数的要求的直接结果,其结果可以得到 间接测量。 间接测量通常有两个问题:一个是已知的误差测量 寻求间接测量误差,即误差变量从 著名寻求错误的邮件数,以及另一种是间接测量一个给定的误差值,查找每个直接测量然后允许的误差 找到自变量的误差已知的功能。
发现并消除系统误差的2.4 在一定的测试条件,测试方法和目标站 米,通常在测试之前,始终由个人或小的误差存在系统误差因素在固体 法律发生多显著给出所造成的测试系统的影响。通常应在测试前的分析和实验,以确定 的影响是从淘汰的原因,或给予纠正 测量。
若使系统误差减小到其随机误差 的大小相当,可不必单独处理的系统错误,并统一用 作为错误处理的机器。 然而,在实践中系统误差无法完全消除,但也有可能是在测量一些更显著系统错误 差。
特别是,系统错误也隐藏在随机误差,所以也就 关键的问题是如何找到数据来检验是否存在系统错误 差,只有解决了这个问题,它可能要进一步企图消灭此外或更正。 系统误差的两个固定值和变量值??,他们影响各不相同。
值系统误差影响重复测量只的平均值,而 不影响均方根误差。它不仅会导致随机误差分布曲线在转变 位置,而不影响其分布与实际点Bufan 周长。
对于不同的系统误差,由于每个上的大小和方向的 效果的测量图像数据是不一样的,而且还具有固定法,不是偶然波动。 如果在系统误差值显著的变化,不仅会影响重 复杂的多次测量的平均值,而且会影响它的每一个固定的规则 残差和均方根错误。
因此,它不仅会改变随机误差的分布 位置,也使变形的分布,这将使它 残差不具有破坏性,而且还影响到实际分布。因此,法应提供以消除其原因,或取得。
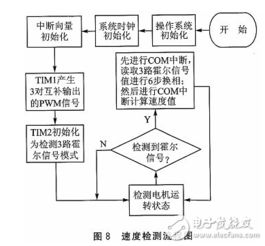
2.STM32的PWM模式
我没太懂你的意思,下面这是我自己写的PWM设置******************************************************************************** Function Name : PWM_GPIO_Configuration* Description : Configure the TIM4 Pins——PB6(TIM4_CH1).* Input : None* Output : None* Return : None*******************************************************************************///此处要注意: PWM输出口要配置为复用推挽输出 void PWM_GPIO_Configuration() { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); }/******************************************************************************** Function Name : PWM_set( u16 clock, u16 num, float duty )* Description : Set clock, num, duty. clock 为 Time1clock(1MHz—72MHz);num 为计数溢出大小;duty 为占空比(0.0—1.0);* Input : u16 clock(1-72), num, duty(0~1000).* Output : None* Return : None*******************************************************************************/ void PWM_set( u16 clock, u16 count, u16 duty ) { u16 Prescaler; //定义预分频系数为Prescaler TIM_OCInitTypeDef TIM_OCInitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //TIM4时钟使能 TIM_DeInit(TIM2); //重新将TIM2设置为缺省值 if ( clock ==72 ) {Prescaler = 0;} else {Prescaler = 72/clock;} TIM_TimeBaseStructure.TIM_Prescaler = Prescaler; //预分频系数为Prescaler,Prescaler = 72/clock,或者为0 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置计数器模式为向上计数模式 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //TIM_CKD_DIV1; //设置时钟分割,设定不分割,时钟为系统时钟 TIM_TimeBaseStructure.TIM_Period = count-1; //设置计数溢出大小,每计num个数就产生一个更新事件 TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure); //将配置应用到TIM2中 TIM_ARRPreloadConfig(TIM2, ENABLE); //使能ARR预装载缓冲器 TIM_Cmd(TIM2, ENABLE); //使能TIM2外设 TIM_OCStructInit(& TIM_OCInitStructure); //设置缺省值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; ////TIM_OCMode选择定时器模式为 TIM脉冲宽度调制模式1。
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能输出状态 TIM_OCInitStructure.TIM_Pulse = (duty*(count + 1))/100; //设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100% ;0~65535 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //TIM输出比较极性高 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; //当MOE=0设置TIM1输出比较空闲状态 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset; //当MOE=0重置TIM1输出比较N空闲状态 TIM_OC2Init(TIM2, &TIM_OCInitStructure); //Configures the TIM2 Channel3 in PWM Mode// TIM_CtrlPWMOutputs(TIM2,ENABLE); //设置TIM2的PWM输出为使能 }。
3.stm32单片机如何调制pam4调制原理
用单片机加外围电路去实现复杂调制或解调的通信没有实际应用意义的。
非要联系起来的话也就只能用来做做低频的原理实验而已。
假设你是打算做验证试验,若只用stm32不可的话。
调制:通过MCU计算调制编码符号,然后直接用DA输出对应载波信号。比如符号00就是DA输出0%,01 --25% 。
解调: 只要2倍速率(或更高速率)AD采样载波信号,然后通过数字运算解码。
实现方法和真正实用的方案完全没可比性
4.学习stm32需要什么基础知乎
你好
学习stm32首先,STM32入门,这个可能需要的是指导教程和技术论文。说实话STM32并不难,因为你可以把它当做单片机来用,至少不会让你觉得入门很难的,具体的,你可以买个开发板,现在开发板市场上多的是,买个口碑好的,然后根据例程,再找个论坛或专题站就完全可以解决。
其次,具体一点话,要学习STM32,第一步可能要理解系统时钟,因为不管你要用到任何片内外设或者是IO口什么的,首先第一步就是要初始化时钟.至于内部寄存器,说实话,确实很多,不过你用到某一块,在看那一块的寄存器,这样更有针对性.
总的思路:时钟, == >GPIO, ==>定时器, == 》 usart模块,这样在熟悉这些基础上,慢慢添加或开发其他模块的操作 , 至于资料, 芯片手册,和STM32官方提供的固件库使用手册就OK了.
固件库呢,就是给你提供了函数,然后你就不用去研究它的寄存器了,通过那些函数就可以直接对STM32进行操作了,但是工作效率嘛,肯定是偏低了,不过刚学的时候可以参考一下,通过固件库函数来对STM32进行理解.
5.购买一个机械臂系统 能做硕士毕业论文吗
一般3-5万字之间,文学一般是三万字,理科相以应的多点,所有硕士论文都是要过论文检测的,比对的是一百年内所有专业的所有论文,每十一个相拟就开始算相拟,不能超过百分之三十,否则延迟毕业,切记,谨慎,别来自己辛苦寒窗得来的学历开玩笑。
知网系统计算标准详细说明:
1.看了一下这个系统的介绍,有个疑问,这套系统对于文字复制鉴别还是不错的,但对于其他方面的内容呢,比如数据,图表,能检出来吗?检不出来的话不还是没什么用吗?
学术不端的各种行为中,文字复制是最为普遍和严重的,目前本检测系统对文字复制的检测已经达到相当高的水平,对于图表、公式、数据的抄袭和篡改等行为的检测,目前正在研发当中,且取得了比较大的进展,欢迎各位继续关注本检测系统的进展并多提批评性及建设性意见和建议。
2.按照这个系统39%以下的都是显示黄色,那么是否意味着在可容忍的限度内呢?最近看到对上海大学某教师的国家社科基金课题被撤消的消息,原因是其发表的两篇论文有抄袭行为,分别占到25%和30%. 请明示超过多少算是警戒线?
百分比只是描述检测文献中重合文字所占的比例大小程度,并不是指该文献的抄袭严重程度。只能这么说,百分比越大,重合字数越多,存在抄袭的可能性越大。是否属于抄袭及抄袭的严重程度需由专家审查后决定。
3.如何防止学位论文学术不端行为检测系统成为个人报复的平台?
这也是我们在认真考虑的事情,目前这套检测系统还只是在机构一级用户使用。我们制定了一套严格的管理流程。同时,在技术上,我们也采取了多种手段来最大可能的防止恶意行为,包括一系列严格的身份认证,日志记录等。
4.最小检测单位是句子,那么在每句话里改动一两个字就检测不出来了么?
我们对句子也有相应的处理,有一个句子相似性的算法。并不是句子完全一样才判断为相同。句子有句子级的相似算法,段落有段落级的相似算法,计算一篇文献,一段话是否与其他文献文字相似,是在此基础上综合得出的。
5.如果是从相关书籍上摘下来的原话,但是此话已经被数据库中的相关文献也抄了进去,也就是说前面的文章也从相关书籍上摘了相同的话,但是我的论文中标注的这段话来自相关的书籍,这个算不算学术抄袭?
检测系统不下结论,是不是抄袭最后还有人工审查这一关,所以,如果是您描述的这种情况,专家会有相应判断。我们的系统只是提供各种线索和依据,让人能够快速掌握检测文献的信息。
6.知网检测系统的权威性?
学术不端文献检测系统并不下结论,即检测系统并不对检测文献定性,只是将检测文献中与其他已发表文献中的雷同部分陈列出来,列出客观事实,而这篇检测文献是否属于学术不端,需专家做最后的审查确认。
一篇论文的抄袭怎么才会被检测出来?知网论文检测的条件是连续13个字相似或抄袭都会被红字标注,但是必须满足3里面的前提条件:即你所引用或抄袭的A文献文字总和在你的各个检测段落中要达到5%。
6.stm32单片机如何调制pam4调制原理
用单片机加外围电路去实现复杂调制或解调的通信没有实际应用意义的。
非要联系起来的话也就只能用来做做低频的原理实验而已。
假设你是打算做验证试验,若只用stm32不可的话。
调制:通过MCU计算调制编码符号,然后直接用DA输出对应载波信号。比如符号00就是DA输出0%,01 --25% 。
解调: 只要2倍速率(或更高速率)AD采样载波信号,然后通过数字运算解码。
实现方法和真正实用的方案完全没可比性